

Snail trail
Creeping forward on a layer of goo, their tell-tale slimy pathway trailing behind them—the way snails move has long puzzled biologists. How is it that snails (and slugs) motor along on slime—the thicker the goo, the faster they move, while a thinner layer of slime offers more resistance?

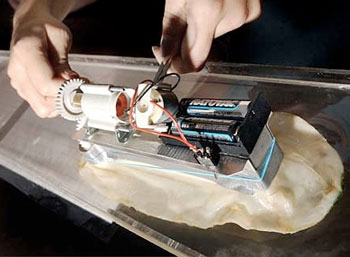
In the past, researchers mainly looked at slime from a biological perspective, rather than from an engineering angle. But now engineers, looking to study the mechanical aspect of snail biology, have constructed a prototype ‘Robosnail’—a robot designed to imitate the way that a number of snail species move.1,2,3 The mass of gears, wiring and pieces of plastic, about 25 cm (10 in) long, creates a series of slow, undulating waves along its rubbery membrane ‘foot’. When this is placed on a thin layer of slime, the robot creeps forward.
But why are engineers interested in copying a creature so small and so (ugh!) slimy?
The leader of the research team explained: ‘If you want to build something that moves over all terrains, it’s better to build it small. A snail has a couple of advantages in this area: it has one foot, it’s small and it can go over anything.’1 And the researchers also hope that studying the way snails push themselves along on a layer of slime would help scientists to better understand how liquids behave on a very small scale—necessary for overcoming present obstacles to the further development of nanotechnology (manufacture of miniature machinery).
This is yet another example of engineers looking to ‘nature’ as they try to devise ways of radically shrinking machines (this field is called ‘biomimetics’). One problem that engineers face is that as they try to shrink everything, liquids start to behave ‘strangely’.3 The smaller the scale, the more ‘sticky’ a liquid seems to be. (Imagine moving a finger back-and-forth on a plate of maple syrup—the thinner the layer of syrup, the harder it is to move one’s finger across the plate.) Part of the snail’s secret is that it uses this very principle.
And this can now be seen in Robosnail, as each wave proceeds along its rubbery bottom.2 Where the undulating wave pushes down the most, and the sticky fluid is thinnest, the fluid resists being pushed back the most. Just behind each wave, an area of high-pressure liquid forms, and the resultant force pushes the snail/Robosnail forward.3
Of course, Robosnail does not generate its own slime like real snails do. The researchers have tried two artificial lubricants, silicone oil and a mixture of glycerine and water, in an effort to imitate the fluid behaviour of slime produced by real snails.1
So far, the constructed robotic snails have only been able to move on smooth horizontal surfaces. ‘We are good at building things that move on flat surfaces, but it would be useful for things to go over all terrains.’ Researchers hope to one day build a smaller version (i.e. more like the size of a real snail) which will be able to scale inclines and maybe even walls,1,3 like real snails can, as well as copying other methods of snail locomotion.2,4
So, at present, man’s technology still trails a snail’s. Looks like the original Designer (Genesis 1, Romans 1:20) knew what He was doing when He designed such a slick method of locomotion, wouldn’t you say?
References and notes
- MSNBC News, Robot copies a snail’s pace,
, 17 July 2003. Return to text. - Robosnail,
, 10 July 2003. Return to text. - Cook, G., MIT scientists copy the snail’s pace, The Boston Globe,
, 10 July 2003. Return to text. - Snail species, in general, exhibit a variety of foot muscle movements when moving forward—not just reverse undulations but also forward undulations, peripheral undulations, and, in some species, the infamous ‘galloping’ when threatened by a predator. Some snails use a combination of muscular action and cilia (thin protrusions underneath the foot) for locomotion. In many species, the foot is divided longitudinally. Return to text.


Readers’ comments
Comments are automatically closed 14 days after publication.